

As fleets of uncrewed maritime systems expand (UMS), it is no longer practical or cost effective to know the characteristics (speed, endurance, depth rating, communication, payload, navigation suite) of each individual system. Any in-mission change, such as a vehicle fault, could require time consuming re-planning across the entire fleet.
The key benefit of a fleet of uncrewed maritime systems is the potential for a “force multiplier” effect. Allowing a network of uncrewed and optionally crewed vehicles to see further, and respond quicker, over a greater area of sea. It is vital that operators are not overloaded, attempting to constantly re-task lots of individual vehicles. Mission-level autonomy where operators provide the task goals, and the autonomy automatically assigns this to the squad is key.
Our approach
SeeByte has been a pioneer in developing autonomy solutions for uncrewed maritime systems, with a focus on scenarios where communication bandwidth and position information are both limited and intermittent. Dynamic adaption, collaborative operation and decentralised control are key components to a successful maritime autonomy solution. As the complexity of tasks increase, particularly with combinations of crewed and uncrewed systems, the level of autonomy required also increases.
Mission-Level Autonomy
Our autonomy solutions build upon these components for broad-ranging crewed and uncrewed fleets of vehicles. Operating as part of a squad, all systems share an understanding of the mission goal, and everyone can contribute their specific capabilities. Our mission level autonomy focuses on what tasks the vehicles are performing to achieve the best outcome
Decentralised Autonomy
In situations where communication bandwidth is variable, or could potentially be interfered with, it is vital that the platforms are resilient to these changes in bandwidth. We have developed autonomy solutions that do not assume either communication bandwidth or external position information. These environments are often referred to as “Comms-denied, GPS-denied”. This is very different to centrally commanded “swarm” autonomy, where constant communication is necessary for successful mission execution.
Scaling to different platforms
Fully supported Software Development Kits (SDK) reduce transition times by integrating third-party hardware, or software modules. This enables vendors to rapidly integrate their platforms, and users to take advantage of each of the platform’s unique capabilities.

Case Studies
Overview
As part of the Joint Warrior exercise SeeByte supported the US Navy Lab of Naval Surface Warfare Center Panama City Division (NSWC-PCD), Defence Research and Development Canada, an agency of the Canadian Department of National Defence, and the UK’s Defence Science and Technology Lab (Dstl).
Demo
SeeByte, together with ASV Global, Bluebear and QinetiQ successfully facilitated the collaboration of uncrewed vehicles (air, surface, and subsea) on common missions running through Dstl’s Maritime Autonomy Framework, realised through SeeByte’s Neptune software.
Result
The world first multi-squad collaborative autonomous MCM mission using seven AUVs, two USVs and one UAV. A total of ten robots across three nations. Following Unmanned Warrior, SeeByte has deployed Neptune operationally to nations such as the RNLN with their new REMUS 100NG systems.


Copyright: CROWN Ben Shread
Overview
SeeByte and the Massachusetts Institute of Technology (MIT) are jointly exploring the feasibility of combining multiple autonomy architectures onto a single autonomous platform to produce the most capable uncrewed system.
Project
The research project, funded by the Office of Naval Research (ONR), is investigating the most suitable approach for combining two of the most widely used autonomy architectures: SeeByte’s Neptune and MIT’s MOOS-IvP. The approach will allow capabilities from both autonomy architectures to be leveraged concurrently based on the mission requirements.
Result
Multi-autonomy architecture concepts that are capable of balancing the variable levels of autonomy and the coordination of behaviors, which in turn will enable a quicker transition of research technology to the fleets.
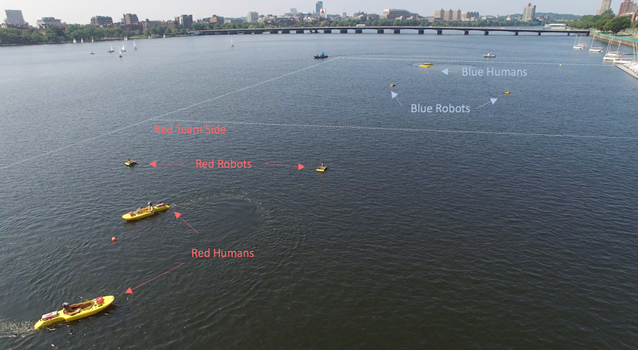
MOOS-IvP autonomy system & human-machine teaming put into practice at the MIT facilities. Courtesy of Massachusetts Institute of Technology
