

Mission Level Autonomy
Neptune is an intelligent, mission level autonomy system for squads of Robotic and Autonomous Systems (RAS).
Neptune assigns goal-based plans and objectives based on the assets capabilities, ensuring each system is used to its potential.
In mission, Neptune will adapt to changes in the environment and coordinate assets to ensure mission success. By augmenting decision making, Neptune allows users to focus on the end goal.
Key Features
From goal-based planning through to complex missions in comms-denied environments, Neptune paves the way to mission success.
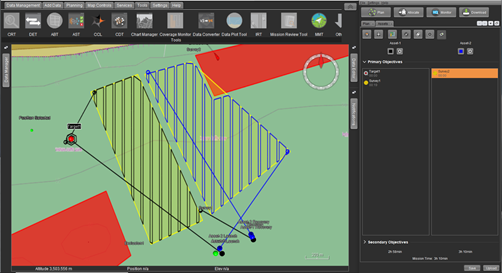
Neptune allows mission plans to be built using a set of goals, rather than individual waypoints. The goal-based plan is then assigned to the squad for execution using embedded autonomy behaviours. This goal-based planning is proven to allow faster mission planning with less errors.
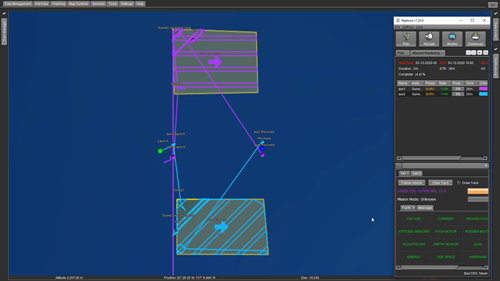
During the mission, Neptune enables your vehicles to adapt to changes in the environment, mission objectives, or other vehicles. For example, healthy vehicles will automatically take over from failing vehicles to ensure the mission is successful.
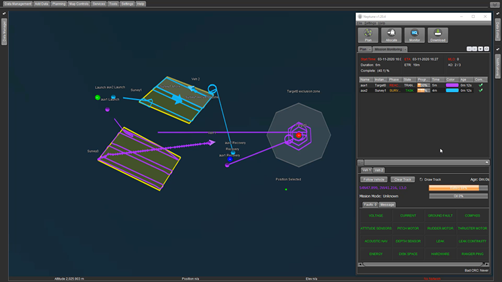
Neptune's decentralised autonomy architecture allows multiple tasks to be run in parallel, with the vehicles automatically taking responsibility for tasks. This optimises mission execution by allowing vehicles to swap tasks, add new tasks, or manage malfunctions. Information is shared across the entire squad, as communication allows, but the decentralised autonomy ensures vehicles operate even in comms-denied environments.
Neptune is built on top of our commercially controlled open architecture. A Software Development Kit (SDK) allows integration of third-party vehicles, sensors, autonomy behaviours or signal processing functions. World-wide government and commercial customers have already benefited from this open architecture.




Additional Modules
All of our products are designed to help manage uncrewed maritime systems, ultimately providing situational awareness across all assets within the battlespace. Neptune's additional modules provide real-time analysis and specialist training.
Automatic Target Recognition (ATR) detects mine-like objects from the sidescan sonar data and helps to classify shapes such as cylinders, wedges, and truncated cone shapes. Our embedded ATR uses fast machine learning techniques to run in real-time. Neptune logs all the classified contacts with an image snippet, and can add dynamic reacquire tasks for the next available vehicle in the squad.
Our Neptune simulator can be used to practice skills and rehearse missions to build confidence in the system and evaluate the best way to include the autonomy in your operational workflow. They can also be used by developers to assist with testing. The simulator is provided in a compact rugged Peli case and comprises up to two simulated uncrewed vehicles.
